Jak obiecałem na końcu poprzedniego tekstu dzisiaj zajmiemy się silnikami liniowymi czyli używając terminologii handlowej siłownikami hydraulicznymi. Skąd nazwa silnik liniowy? Wynika to z charakterystyki pracy. O ile w silnikach hydraulicznych ruchu obrotowego efektem przetworzenia energii był moment obrotowy, czyli wirowanie wałka mówiąc najprościej , to w silnikach liniowych otrzymujemy ruch roboczy prostoliniowy, którego wartość można wyrazić w kilogramach lub kiloniutonach. Ruch ten ma określony skok uzależniony od konstrukcji siłownika lub wymaganych parametrów.
Na jakiej zasadzie działa siłownik?
Siłownik hydrauliczny w swoim działaniu wykorzystuje zjawisko rozchodzenia się ciśnienia w cieczach we wszystkich kierunkach, czego efektem jest dążenie cieczy do powiększenia objętości zbiornika, który wypełnia, na skutek parcia na ściany zbiornika pod wpływem siły zewnętrznej (prawo Pascala). Jeżeli jedna ze ścian zbiornika będzie ruchoma, to parcie wywierane na ścianę przez olej pod ciśnieniem spowoduje jej przesunięcie. Jeżeli ten ruch wykorzystamy do wykonania jakiejś pracy, wówczas możemy powiedzieć, że mamy do czynienia z siłownikiem hydraulicznym, ponieważ dokonaliśmy zamiany energii zawartej w oleju pod ciśnieniem na pracę.
Prawo Pascala : „jeżeli na płyn (ciecz lub gaz) w zbiorniku zamkniętym wywierane jest ciśnienie zewnętrzne, to (pomijając ciśnienie hydrostatyczne) ciśnienie wewnątrz zbiornika jest wszędzie jednakowe i równe ciśnieniu zewnętrznemu.
Wersja uproszczona: „Ciśnienie zewnętrzne wywierane na ciecz lub gaz znajdujące się w naczyniu zamkniętym rozchodzi się jednakowo we wszystkich kierunkach”.
Wyżej opisane zasady dotyczą wszystkich siłowników niezależnie od ich budowy i zastosowania. W tym artykule zajmiemy się siłownikami teleskopowymi.
Możemy wyróżnić kilka rodzajów siłowników w zależności od cech konstrukcyjnych. Na potrzeby niniejszego tekstu jako praktyk dokonał bym takiego oto podziału:
- Siłowniki teleskopowy
- jednostronnego działania
- z powrotem grawitacyjnym lub innej siły zewnętrznej
- z powrotem wymuszonym sprężyną
- dwustronnego działania
- Siłowniki tłokowe
- jednostronnego działania
- dwustronnego działania
- z jednostronnym tłoczyskiem
- z dwustronnym tłoczyskiem
- z programowalnym skokiem
- Siłowniki nurnikowe
- z powrotem grawitacyjnym lub innej siły zewnętrznej
- z powrotem wymuszonym sprężyną
Siłownik jednostronnego działania to taki w którym ruch roboczy wykonywany pod wpływem zasilania olejem odbywa się w jedną stronę, najczęściej w kierunku wysuwania tłoczyska lub teleskopu. Ruch odwrotny odbywa się pod wpływem siły zewnętrznej najczęściej powiązanej z oddziaływaniem siły grawitacji ewentualnie z wykorzystaniem sprężyny. Najłatwiej go zidentyfikować po liczbie ilości punktów przyłączeniowych. Siłownik jednostronnego działania ma zawsze jeden króciec przyłączeniowy. Dla dociekliwych dodam że jeżeli siłownik dwustronnego działania możemy wykorzystać jako jednostronny to wówczas będzie on miał dwa przyłącza.
Siłownik dwustronnego działania to taki w którym ruch wysuwania i wciągania tłoczyska lub teleskopu odbywa się pod wpływem działania strumienia oleju zasilającego siłownik.
Na rysunku 1 znajduje się przekrój siłownika teleskopowego jednostronnego działania, którego budowa stanowi przykład najbardziej typowego rozwiązania zabudowy poszczególnych elementów składowych takich siłowników.
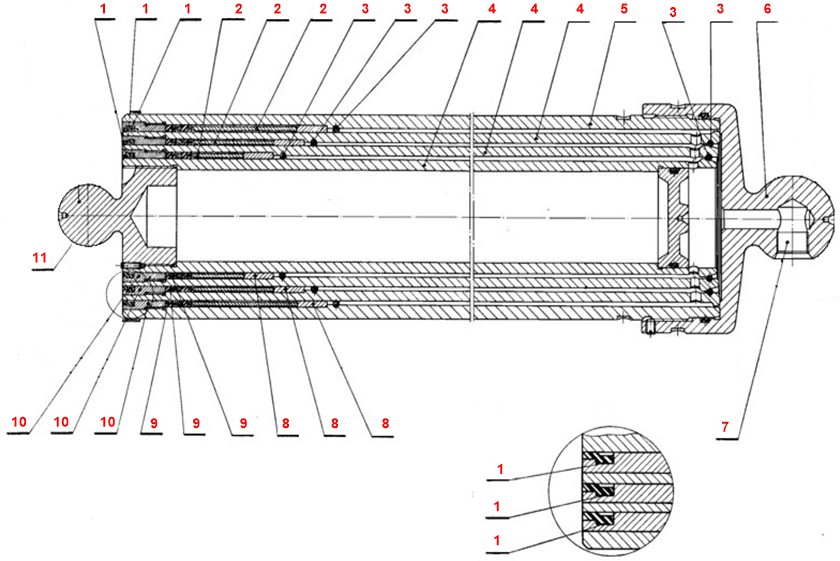 Rysunek nr 1. Przekrój siłownika teleskopowego trzystopniowego z mocowaniem na przegubach kulistych.
Rysunek nr 1. Przekrój siłownika teleskopowego trzystopniowego z mocowaniem na przegubach kulistych.
- Pierścień zgarniający typu Z
- Wkładka dystansowa
- Pierścień rozprężny
- Tuleja teleskopowa
- Korpus zewnętrzny
- Dno siłownika
- Kanał zasilający
- Wewnętrzny pierścień prowadzący
- Uszczelnienie teleskopu typ TTI, TTU, GER
- Zewnętrzny pierścień prowadzący
- Główka przegubu kulistego
Siłowniki teleskopowe ze względu na swoją budowę w trakcie pracy ulegają wyboczeniu. Wynika to ze sposobu prowadzenia jednego teleskopu w drugim. Rozstaw pierścieni prowadzących najczęściej nie przekracza 100 mm, co stanowi mniej niż 1/3-1/6 długości każdej sekcji teleskopu. Biorąc pod uwagę, że są dwie, trzy i więcej wysuwane sekcje, w naturalny sposób powstaje z nich łuk zawarty między miejscami podparcia siłownika. Jest to sytuacja normalna, która występuje zawsze w tego typu siłowniku. Ważne, aby wyboczenie nie przekroczyło wartości naprężeń sprężystych, co powoduje odkształcenie plastyczne, a w efekcie uszkodzenie teleskopu. Siłowniki teleskopowe najczęściej spotykane są w samochodach typu wywrotki. O ile praca w zastosowaniach stacjonarnych nie stwarza problemów, o tyle w zastosowaniach mobilnych pojawiają się pewne problemy. Każdy kierowca wywrotki powinien pamiętać, że nie wolno jeździć z wyteleskopowanym siłownikiem, a zwłaszcza gwałtownie ruszać lub hamować. W trakcie takich manewrów powstają duże dynamiczne obciążenia, które w połączeniu z naturalną tendencją do samoistnego wyboczenia siłownika mogą doprowadzić do odkształcenia sekcji teleskopu. Objawami tego będą większe opory przy składaniu siłownika i wycieki oleju.
Wyboczeniem nazywamy zjawisko wyginania się pręta ściskanego siłami osiowymi.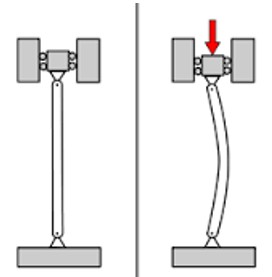
Siłą krytyczną wyboczenia nazywamy graniczną wartość po przekroczeniu, której następuje przejście od odkształcenia sprężystego do odkształcenia plastycznego i utrata stateczności konstrukcji. Wartość tej siły zależy od długość konstrukcji, wielkości i kształtu przekroju oraz od sposobu zamocowania konstrukcji i użytego materiału.
Działanie siłownika teleskopowego w sposób dosłowny wypełnia przedstawioną na początku zasadę działania. Kanałem 7 na rys.1 doprowadzamy olej pod ciśnieniem do wnętrza siłownika. I tu zaczynają się „czary” bo siłownik zaczyna się rozkładać od największego teleskopu do najmniejszego mimo, że w jego konstrukcji nie ma żadnego mechanizmu odpowiedzialnego za kolejność wysuwania się kolejnych sekcji. Niestety, ale czarów w tym nie ma, a tak naprawdę odpowiadają za to proste prawa fizyki. Wszystkie powierzchnie czołowe kolejnych sekcji się sumują i mamy w zasadzie jedną płaszczyznę tłoka na którą działa ciśnienie wystarczające do dźwignięcia ciężaru. W momencie gdy największy teleskop wykona pełny skok następuje chwilowe zatrzymanie siłownika, a w tym czasie w siłowniku rośnie ciśnienie do wartości wystarczającej do dźwigania ciężaru przez mniejszy tłok. Pamiętając że powierzchnię tłoka stanowią w tym wypadku pozostałe sekcje siłownika. Taka procedura powtarza się przy wysuwaniu kolejnych sekcji. W taki sposób to ciśnienie stanowi mechanizm ustalający kolejność wysuwania się poszczególnych sekcji. Jest tylko jedno zastrzeżenie warunkujące prawidłowe działanie tego mechanizmu. Warunkiem prawidłowego działania siłownika jest jego odpowietrzenie. Jeżeli nie odpowietrzymy siłownika to mechanizm ten nam nie zadziała ponieważ powietrze jako ściśliwe będzie zaburzało swoim zachowaniem narastanie ciśnienia. W praktyce wygląda to tak, że w pewnym momencie teleskop o większej średnicy wysuwa się bardzo dynamicznie co powoduje spadek ciśnienia i chowanie się również bardzo dynamicznie mieszczącej się w nim mniejszej sekcji. Zjawisko to jest bardzo niepożądane i stanowi przyczynę wielu uszkodzeń. Najczęściej spotykanym zastosowaniem tych siłowników są wszelkiego rodzaju wywrotki, czyli zastosowanie mobilne, lub wywrotnice jako zastosowanie statyczne. Uogólniając siłowniki takie stosowane są tam gdzie musimy mieć siłownik o dużym skoku przy wymaganiu krótkiego elementu w pozycji złożonej. Dzięki swej budowie siłowniki te mogą mieć nawet stosunek 1 do 10 w wymiarach złożony i wyteleskopowany, co jest wartością nieosiągalną dal innych siłowników.
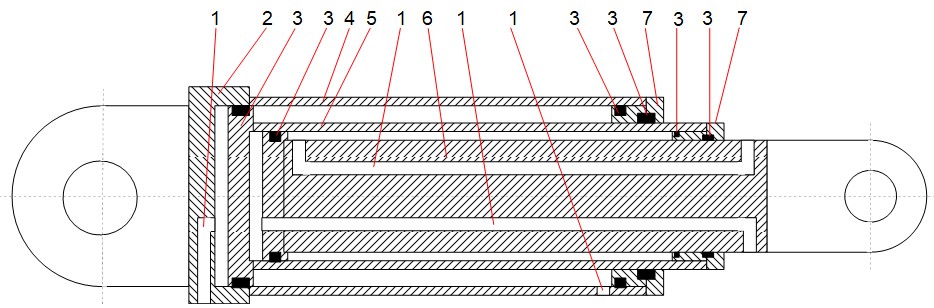
Rys. 2 Siłownik teleskopowy dwustronnego dziania.
- Kanał zasilający
- Dno siłownika
- Uszczelka
- Korpus siłownika
- Teleskop duży
- Teleskop mały
- Dławnica
Inną odmianą siłownika teleskopowego jest siłownik dwustronnego działania. Nie jest to często spotykane rozwiązanie ze względu na dosyć skomplikowaną metodę zasilania i budowę. Siłownik taki jest swego rodzaju hybrydą stanowiącą połączenie siłownika teleskopowego i tłokowego. Najczęściej spotykaną odmianą tego siłownika jest wersja z dwoma teleskopami. Siłownik taki wymaga ze względu na budowę zasilania każdego teleskopu oddzielnie. Można to zrealizować przy pomocy sterowania dwoma rozdzielaczami załączanymi w odpowiedniej kolejności lub jednym rozdzielaczem z wykorzystaniem zaworu sekwencyjnego ( zawór sekwencyjny pozwala dzięki nastawialnemu ciśnieniu ustalić kolejność działania sterowanych elementów) . Najczęściej siłowniki zasilamy od strony mocowania do elementu statycznego. Ta zasada dotyczy wszystkich siłowników, ponieważ siłowniki wykonują w trakcie pracy ruch wahliwy, wymusza to zasilanie przez przyłącza elastyczne najczęściej węże. Można również spotkać rozwiązania ze złączem obrotowym. Gdybyśmy zastosowali inny sposób zasilania to węże musiały by być znacznie dłuższe co mogło by powodować ich uszkodzenia z powodu splątania lub zgniecenia przez napędzane elementy. Siłownik teleskopowy dwustronnego działania zasilamy z obydwu stron i elementu statycznego jak i ruchomego. Budowa takiego siłownika jest podobna do zwykłego teleskopu, jednak budowa samych teleskopów jest już inna. Korpus zewnętrzny siłownika pod względem budowy może być taki sam jak w zwykłym teleskopie. Natomiast duży teleskop ma dno dzięki czemu możliwy jest podział przestrzeni roboczych teleskopów, co jest podstawą działania całego układu. Mały teleskop osadzony jest w wewnętrznej przestrzeni dużego teleskopu. W małym teleskopie są wydrążone dwa kanały jeden sięgający na drugą stronę tłoka a jeden zakończony otworem nad tłokiem. Siłowniki tego typu są rzadkimi rozwiązaniami. W swojej praktyce zawodowej nie naprawiałem nigdy tego typu siłownika. Z literatury wiem, że stosuje się je na przykład w okrętownictwie do otwierania furty załadowczej promów samochodowych. Jest to bardzo ciekawe rozwiązanie techniczne wykorzystujące podstawową zaletę teleskopów czyli ponad dwukrotny wzrost długości przy wyteleskopowaniu w stosunku do stanu złożonego. Pamiętać należy jednak że wadą takiego rozwiązania jest mała sztywność więc elementy napędzane muszą posiadać precyzyjne zawieszenie na sworzniach w zawiasie, przy elementach wykonujących ruch wahliwy. Ewentualnie dodatkowe prowadzenie na kolumnach przy ruchu prostoliniowym. Innym ważnym zagadnieniem jest aby siłownik taki ustawić tak aby wykonywał pracę ciężką przy wysuwaniu, a składanie odbywało się przy wspomaganiu na przykład grawitacji. Wynika to z budowy która powoduje bardzo dużą różnicę powierzchni tłoka od strony wysuwania i wciągania teleskopu. Różnica taka może być nawet 10:1 co oznacza, że siła przy wciąganiu jest znacznie mniejsza od siły pchającej. Mimo to siłowniki takie bywają jedynym możliwym rozwiązaniem technicznym w określonych warunkach.
W tym tekście omówiliśmy pokrótce dwa typy najbardziej typowych siłowników teleskopowych. W praktyce możemy spotkać większą liczbę rozwiązań do specyficznych zastosowań, ale wszystkie będą bazowały na opisanych powyżej rozwiązaniach. Różnice będą polegały na sposobie łożyskowania punktów osadzenia siłownika czy wykorzystanych uszczelnień lub ilości teleskopów. W przyczepach rolniczych spotkamy osadzenie siłownika w kołyskach lub zawiesiach dających swobodę ruchu w dwóch kierunkach wychylenia, co pozwala na wyładunek do tyłu i na boki, co znacznie poprawia parametry eksploatacyjne przyczepy. Możemy również spotkać siłowniki z ogranicznikiem skoku co zabezpiecza przed uszkodzeniem, bo teleskopy maja tendencję do „wyskakiwania” jeżeli osiągną maksymalny skok a nie nastąpi odłączenie zasilania. Bardzo przydatne w sytuacji gdy ciągniemy dwie przyczepy lub napędzamy niewidoczny element co nie pozwala kontrolować skoku.
W kolejnym tekście zajmiemy się siłownikami tłokowymi, które są najczęściej spotykanymi rozwiązaniami w technice napędów hydraulicznych. Omówimy bardziej szczegółowo te siłowniki z podziałem na poszczególne odmiany w zależności od zastosowań. Już dziś zapraszam do przeczytania kolejnego odcinka vademecum hydrauliki siłowej.